Experiences
This section involves work and research experiences I participated through affiliation.
For research projects, you can click on images for more information.

-PlusAI, Inc. (06/2025 ~ 09/2025)
During my internship, I focused on improving the self-driving engagement flow with a redundant system for fallback and enhancing the vehicle’s response to emergency vehicle detection. I designed and implemented a robust full-stack fallback mechanism, complete with user-facing UI elements and backend data-extraction tools to ensure system reliability and facilitate debugging. In parallel, I collected siren data across diverse environmental conditions and developed an integrated real-time pipeline that processed detection signals and delivered them seamlessly to the autonomy stack.
-Stanford University Collaborative Haptics and Robotics in Medicine Lab (01/2025 ~ 04/2025)
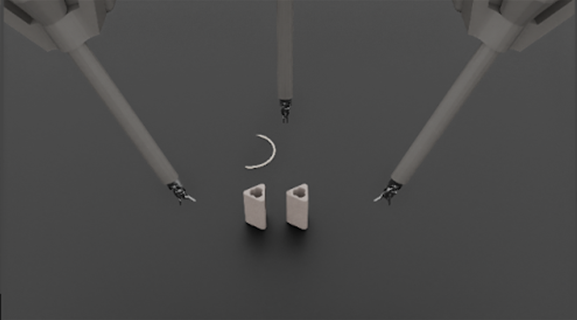
This project focused on enabling autonomous assistance in robot-assisted surgery using additional robotic arms beyond those manually operated by the surgeon. To support data collection and scalable testing, I built a simulation environment in Isaac Sim using ORBIT-Surgical assets. The setup includes the teleoperation of a simulated da Vinci robot arms via both an existing interface and the Phantom Omni device, allowing flexible experimentation for learning-based control systems.
-RideFlux, Inc. (07/2023 ~ 07/2024)
I developed, verified, and maintained Planning/Prediction features for autonomous vehicles using C++ and ROS. Specifically, my role was to improve the decision-making and prediction performance by using additional information, such as road structures and previous decisions. One of my significant projects involved integrating a function to handle potential road users in obstructed areas without making the vehicle overly conservative.
During this period, the company achieved the first unmanned vehicle license in South Korea, and I contributed by developing features for safe lane changes, Operational Design Domain(ODD) checking, etc.
-Seoul National University Soft Robotics & Bionics Laboratory, Prof. Yong-Lae Park (07/2021 ~ 02/2023)
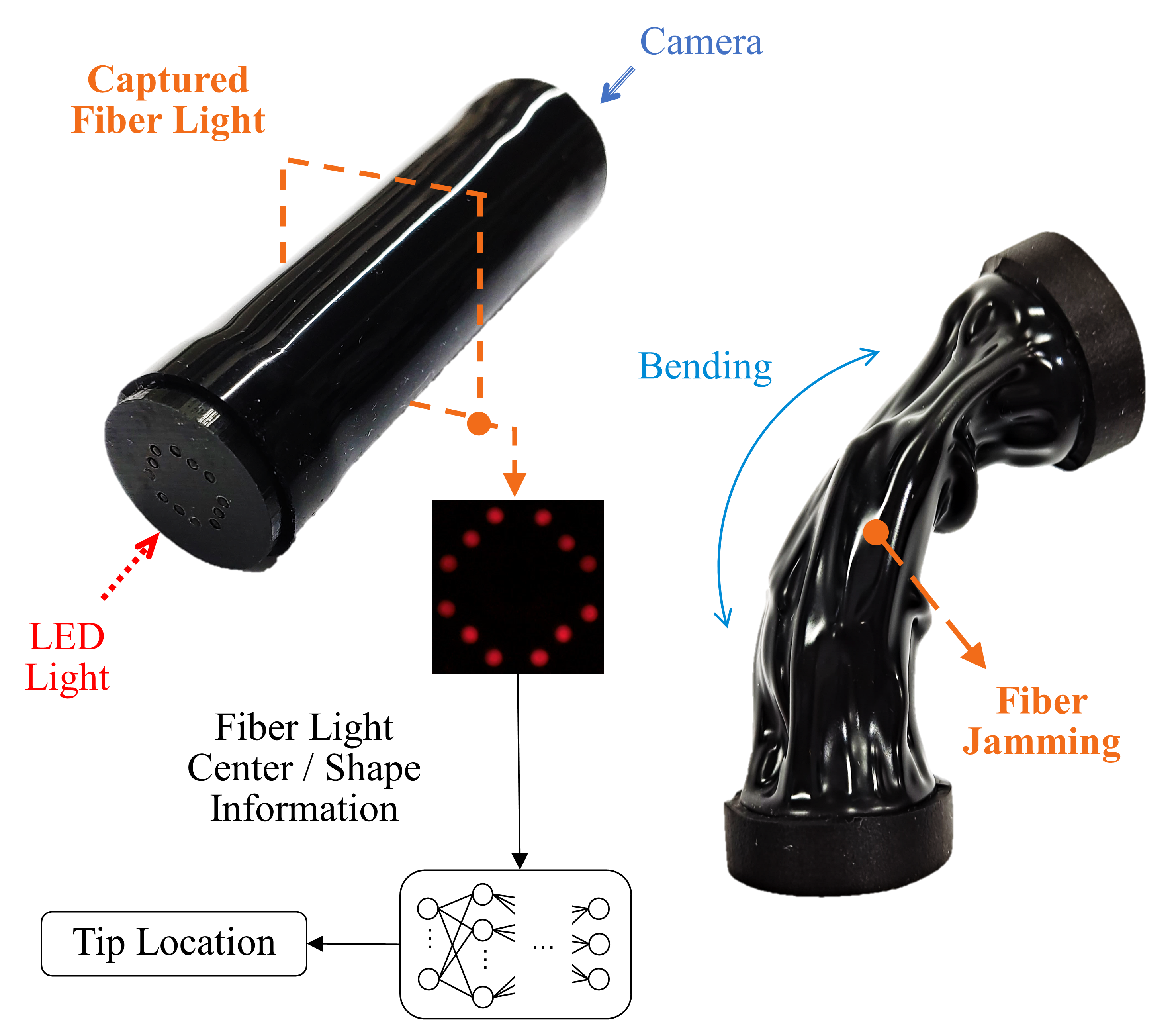
This work involved designing and fabricating a multi-functional soft-bending actuator and a control system for the actuator from scratch. Using optic fiber as a main material, this actuator is able to have variable stiffness through fiber jamming and proprioceptive sensing through fiber optics.
With this work, I co-authored the article “Soft Bending Actuator with Fiber-Jamming Variable Stiffness and Fiber-Optic Proprioception” for IEEE Robotics and Automation Letters. Also, I presented this work at the 2024 IEEE International Conference on Robotics and Automation.
-Seoul National University Photonics Systems Laboratory, Prof. Namkyoo Park (07/2022 ~ 06/2023)
I adapted and tested a drone control algorithm, ‘Neural-Fly’, which enables robust flying under wind effect, in an Airsim simulator using Python. I started by constructing a simulator environment and collecting data to train and evaluate the neural network used in the algorithm. Utilizing inputs and outputs from the simulator, I coded the control algorithm introduced in the original paper. I could demonstrate that the performance of the rebuilt algorithm is close to that of the original paper.

-Seoul National University Biorobotics Laboratory, Prof. Kyu-Jin Cho (01/2021 ~ 06/2021)
As an Undergraduate Research Opportunity Program (UROP) participant, I worked on improving a prototype of an active hamstring assisting wearable, starting with fabricating the whole structure again with several design improvements for user comfort.
Through separate experiments, I figured that the mechanical delay is the main reason for the lack of assistance during gait with fast speed. To address this issue, I developed a PID control algorithm for a faster motor and explored the idea of predicting gait states using encoder output, allowing for earlier activation of assistance.